Under tiden 1973 tom 1985 var jag anställd som elektronikchef på Åkermans Mekaniska Verkstad i Eslöv. En elektronikenhet hade skapats och den ingick i Experimentavdelningen. Chef för avdelningen var Olof Oldéus. Till att börja med var jag den ende elektronikern på företaget, men efter hand anställdes fler. När så Oldéus gick i pension delades avdelningen upp i dels elektronikavdelningen med mig som chef och i hydraulikavdelningen med Kaj Westman som chef.
Till mina första uppgifter hörde att konstruera om grävmaskinernas elsystem samt att anskaffa eller bygga elektroniska mätinstrument för alla de tester som avdelningen gjorde på de olika grävmaskinsmodellerna. Vidare fick jag tidigt ta hand om alla ljudmätningar, som behövdes för att kontrollera och förbättra maskinernas bulleremissioner.
En självpåtagen uppgift var utvärdering och inköp av företagets första datorsystem 1975. Den skulle användas för i första hand effektivisering av programmeringen av de numeriska verktygsmaskinerna: svarvar, fleroperationsmaskiner, gas- och laserskärningsmaskiner. Från att ha använt fickräknare och klippmodeller mm så övergick man till programmering med hjälp av grafiska datorterminaler. Till detta användes en minidator av fabrikatet Prime 300; en av de första minidatorerna med virtuell minnesteknik. Jämfört med dagens datorer var prestanda mycket blygsamma.: 32 kords primärminne; 3 MB hårddisk. Dock klarade den av grafisk programmering vid flera samtidiga grafikskärmar samt övriga tekniska beräkningar vid textskärmar.
I samband med att den första hjulburna grävmaskinen H9M introducerades, kom den första elektronikkonstruktionen in i seriemaskinerna. Det var en larmenhet, som indikerade för diverse fel med lysdioder och en blinkande lampa. Det visade sig snart att den elektriska miljön i en grävmaskin inte var så snäll mot elektroniken. Så småningom lärde vi oss dock hur man skulle skydda sig mot transienter o.d.
Ungefär samtidigt konstruerade jag ett digitalt tidur till motorvärmaren. Det blev en populär produkt. I stället för att vara begränsad till 24 timmars förinställning med en "äggklocka" så kunde man med det nya tiduret ha förinställningar upp till 99 timmar. På så sätt kunde man komma till en varm maskin även efter en långhelg.
Vi fick ofta förfrågan från kunder om vi inte kunde ta fram en nivåmätare, så att man från hytten kunde se om grävdjupet var det önskade. Jag antog utmaningen naturligtvis, och resultatet blev ytterligare en populär produkt, som vi tog ut patent på. Jag använde specialpotentiometrar med 360 graders cosinusfunktion. På deras axlar sattes en blyvikt och allt badade i hydraulolja. Det var alltså vinkeln mellan vertikalplan och bommen resp. skaftet, som mättes med hjälp av en dämpade pendeln, och ut från potentiometern erhölls cosinus av vinkeln, dvs aggregatdelens utsträckning i vertikal led. Sedan var det bara att vikta signalerna från potentiometrarna med längderna så erhölls grävdjupet. Onoggrannheten var ett par cm.
|
|
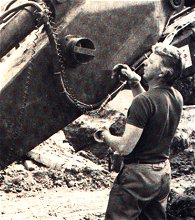
| Vinkelgivare monterad på skaftet. Ägaren Tore Segerström inspekterar. |
Mitt dator- och elektronikkunnande ledde mig så småningom till mikroprocessorer, som var relativt nya i mitten av 70-talet. 1977 gjorde jag en studiegruppresa till USA anordnad av den nyligen startade tidningen Dagens Industri. En av deltagarna var för övrigt Lars Karlsson, känd som skaparen av ABC80. Vi besökte många olika tillverkare och användare av mikroprocessorer , bl.a. Intel, Zilog. Och 1978 fick jag i uppdrag av Tekniske Direktören Bertil Norlin att ta fram en prototyp till ett mikrodatorbaserat styrsystem till grävmaskinerna. Arbetsnamnet blev "Compex"; Computerized Excavator. Namnet skulle även ge en association till Kompis, något positivt.
Den processor som valdes blev Zilog Z80 med en klockfrekvens på 2,5 MHz. Dagens processorer har 1000 gånger högre frekvens! Som prototypmaskiner fick vi två stycken H12B att leka med. På dessa testades inte enbart mikroprocessorsystemet utan en annan viktig test var ett nytt hydrauliksystem med variabla, lastavkännande pumpar.
Efter hand infördes fler och fler funktioner i mikroprocessorsystemet:
elektroniska styrspakar ("joy sticks") och fotpedaler. De bestod av dubbla, motverkande potentiometrar för varje rörelse för att på så sätt få en felsäker funktion vid kabelbrott etc.
snapsglasfunktion i styrspakarnas karakteristik för att ta bort dödbandet i neutralläget, dvs så fort man rörde på spaken skulle rörelsen starta mjukt.
varvtalsstyrning av dieselmotorn ("fuel miser"). Man ställde in önskat varvtal med en ratt, och hade man inte rört spakarna under en viss tid ställdes motorns varvtal ned för att spara bränsle och minska bullernivån. Konstruktionen blev patenterad senare.
informationsenhet med övervakning av generator, oljetryck, temperaturer mm.
nivåmätare. I varje aggregatled satte vi en potentiometer, som mätte vinkeln mellan t.ex. bommen och skaftet. Vinklarna räknades sedan om till x/y-koordinater för resp. del. Egentligen var det en 2-dimensionell mätning, dvs man mätte skopspetsens läge både i höjd- och längsled.
ändlägesdämpning av hydraulcylindrarna. Informationen från vinkelmätningen användes för att avgöra om kolven närmade sig ett ändläge, och om så var fallet reducerades maximalt tillåtna hastighet i förhållande till avståndet till ändläget. Denna lösning blev sedan patenterad.
display där man kunde avläsa motorvarvtal, temperaturer, laddningsspänning, oljetryck, grävdjup mm numeriskt.
automatisk grävning av plan yta med viss lutning. Man knappade in önskad lutning och styrde sedan skaft och skopa med spakarna på vanligt sätt. Automatiken mätte sedan skopspetsens läge och höjde eller sänkte bommen för att få skopspetsen att följa den önskade planlutningen. Även denna konstruktion blev patenterad.
Till skillnad mot den tidigare nämnda informationsenheten så hade vi inga tillförlitlighetsproblem med elektroniken i Compex. Det fanns större ekonomiskt utrymme att bygga in skydd och säkerhet. Över huvud taget hade vi inte några problem med tekniken. Dock inträffade det saker. När vi i mitten av 80-talet satte in en NMT450-telefon i hytten och ringde ett samtal så började plötsligt maskinen att arbeta på egen hand. Högfrekventa störningar omvandlades i styrspakarna till styrsignaler!
En av maskinerna såldes med förbehållet att vi fick komma och göra tester på den ute i fält. Den andra maskinen behöll vi för egna tester hemma. För testerna inne på fabriksområdet hade vi testutrustning och datorer i en gammal fuktskadad husvagn och ute i fält använde vi en specialinredd Chevy Van. Där hade vi utvecklingsdator, emulator, skrivare och intercom. Under testerna kopplade vi ur mikroprocessorn i grävmaskinen och körde i stället med emulatorn i utvecklingssystemet. Alla analoga och digitala in- och utsignaler överfördes via en lång navelsträng. Vi kunde då sitta i bussen och sätta brytpunkter i programmet vid felsökningar, göra programändringar och starta på nytt. En viss försiktighet var nödvändig. Att stoppa programexekveringen under en överdelssväng var inte rekommendabelt, eftersom all utgångar, t.ex. svänghastigheten, behöll sitt värde då programmet stoppades.
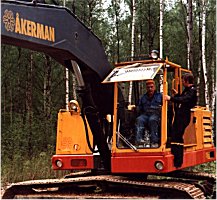 |
| Compex 2 utanför Lessebo. Sven-Erik i samspråk med ägaren.. |
Efterföljaren till Compex blev EMAC, Electronic Machine Controller. Vi konstruerade om hårdvaran men behöll de huvudkomponenter, som vi använt i Compex. Ny kapsling, nya kontaktdon och nya kretskortslayouter. EMAC sattes in seriemässigt i 18 maskiner.
Vi som jobbade med elektroniken på Åkermans var.
jag själv Östen Tordenmalm, avdelningschef
Christer Andersson, som var den som jag anställde först. Han hjälpte till med hårdvarukonstruktioner, komponentval, tester, ljudmätningar mm.
Johan Norén, som anställdes som mikroprocessorprogrammerare 1978. Han och jag tillsammans satte upp specifikationerna, som Johan sedan omsatte till assemblerkod. Han slutade efter ett par år.
Ronny Nilsson, montering, testning
Göran Larsson, hårdvarukonstruktör, mönsterkortslayouter.
Ingvar Bruhn, som efterträdde Johan, och som senare kom att efterträda mig
Calle Walldén, som efterträdde Ingvar.
Läs mera om EMAC och avdelningen i en artikel i personaltidningen Kvadrat.
Bland övriga på Åkermans som vi arbetade mycket tillsammans med i Compex-projektet kan nämnas:
Kaj Westman, chef experiment-/hydraulikavdelningen och som tillsammans med
Bertil Olofsson från konstruktionsavdelningen svarade för utvecklingen av det nya hydrauliksystemet
Sven-Erik Pal, som agerade som testpilot och kritiker. Det var Sven-Erik, som satt i hytten och utvärderade resultatet av samspelet mellan våra programmeringar och det nya hydraulsystemet. Han bidrog också med många tips och förslag på förbättringar
Göran Springchorn, testpilot
Karl Isaksson, vars idéer och praktiska kunnande bl.a. resulterade i en förträfflig styrspakskonstruktion
Jan-Erik "Kirre" Andersson, finmekaniker som i verkstaden filade och filade på ventiler och spakar mm
Thomas Jervall, hydraultekniker som även hjälpte till med reglertekniken.
|
|
| Sven-Erik och Ingvar vid en av fälttesterna |
Naturligtvis var inte marknaden mogen för en så avancerad grävmaskin på 80-talet. Dock kom flera delar av konceptet ut som produkter. Jag tröttnade dock på att vänta på genombrottet och sade upp mig från Åkermans i slutet av 1985. Min chef Karl-Oskar Olsson kontaktade då Ingvar Bruhn och frågade om han ville komma tillbaks som elektronikchef. Och det ville Ingvar, som sedan var kvar ända till slutet.
Läs mera om "spin-off"-produkterna i en artikel i kundtidningen m3.
Jag hade varit anställd i 13 år då jag slutade, och det hade varit en oerhört intressant tid på ett trevligt företag. "Åkerman-andan" fanns där, och man var stolt över företagets produkter. Det är med en viss sorg i hjärtat man följt företagets öde under senare år.
